Dentro de este grupo de elementos se encuentran todos los sensores con los que el robot capta las distintas variables a controlar. Estas variables pueden ser de temperatura, movimiento, proximidad, iluminación, posición, presión, velocidad, etc. En la siguiente tabla podemos ver algunos ejemplos de estos sensores:
Temperatura |
NTC
PTC
Termorresistencia
Termopar
Bimetal
|  |
Posición
|
Final de carrera
Relé reed
|  |
Proximidad y movimiento
|
Transductores Inductivos
Capacitivos
Resistivos
Ultrasonidos
|  |
Velocidad
|
Tacómetros
|  |
Presión
| Manómetros
Galgas extensiométricas
|  |
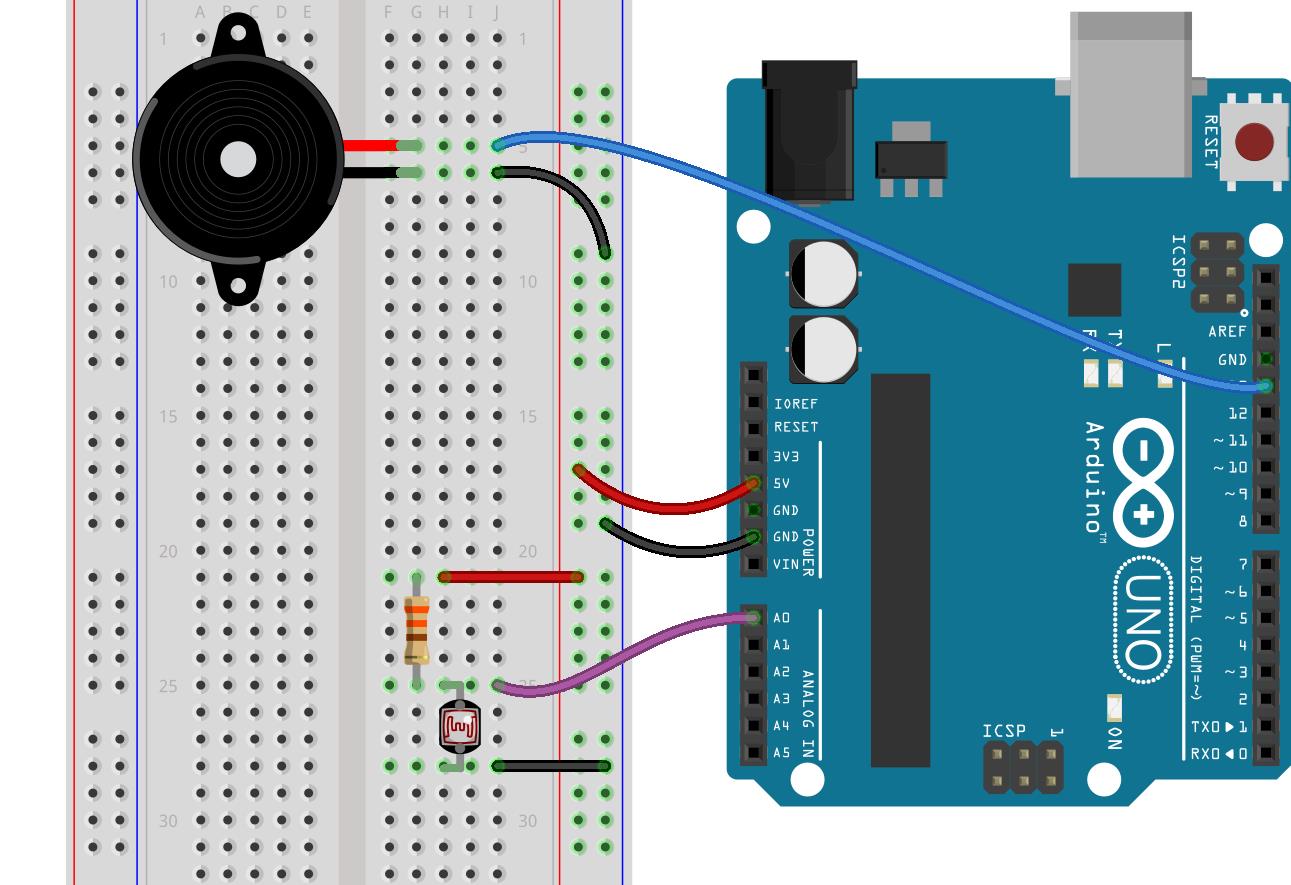
Iluminación
|
LDR
Fotodiodos
Fototransistores
|  |




No hay comentarios.:
Publicar un comentario